|
|
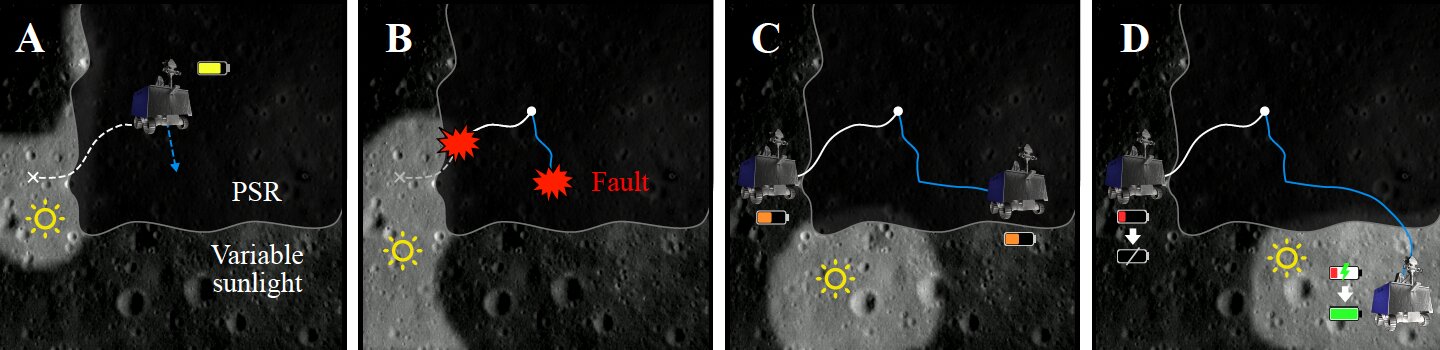
我们方法的概念性概述。大多数用于太阳能供电的长距离导线规划算法没有主动考虑可能的导航延迟。在这里,虚白色路径显示了一个计划,该计划将PSR内的漫游车尽快引向阳光,但它对可能的延迟没有弹性,这种延迟将导致漫游车落后于计划,并错过关键的太阳能充电事件。另一方面,主动考虑延迟(蓝线)的规划策略将使漫游车走上潜在的更长但更安全的轨迹。鸣谢:背景图像和蝰蛇漫游者渲染:美国宇航局和亚利桑那州立大学。
据美国物理学家组织网(英格丽德·法德利):美国宇航局和世界各地的其他太空机构定期向太空发送机器人和自动飞行器,以探索太阳系中的行星和其他天体。这些任务可以大大提高我们对太阳系其他地方的环境和资源的了解。
多伦多大学航空航天研究所和美国宇航局喷气推进实验室(JPL)的研究人员最近进行了一项研究,探索可以提高使用太阳能漫游车进行月球探索的有效性和成功率的回收策略。他们的论文预先发表在arXiv上,介绍了一种新的方法,可以帮助太阳能漫游车安全地离开月球上永久的阴影区域。
领导这项研究的研究员Olivier Lamarre告诉Phys.org:“近年来,几个国家已经表示对探索月球南极感兴趣,包括美国、中国、印度、俄国和其他国家。”。
“他们中的大多数人计划使用太阳能漫游车来探索经常处于阴影中的区域(称为永久阴影区,或PSRs),我们怀疑这些区域可能包含大量的水冰。可以想象,用太阳能漫游车进入PSR是一项冒险的尝试!如果漫游车因故障而延迟,它可能无法在能量耗尽前回到阳光中。”
太阳能漫游车在能效方面有许多优势,但它们受到依赖太阳光运行的限制。由于月球上的一些区域永久处于阴影中,漫游者对阳光的依赖可能会阻止他们安全地探索然后离开这些区域,导致他们在执行任务时耗尽能量。
拉马尔和他的同事最近工作的一个关键目标是量化失去太阳能漫游车的概率,因为他们正在探索月球上的这些阴影区域。此外,该小组希望设计一种方法,帮助最大限度地提高太阳能漫游车安全完成任务的概率。
“首先,我们需要定义太阳能漫游车在月球南极‘安全’意味着什么,”拉马尔解释道。“为了做到这一点,我们关注漫游车在什么地方、什么时间离开PSR,以及它的电池还剩多少能量。这表明了漫游车在下一段任务之前是否可以在原地冬眠(因此,在那之前保持“安全”)。然后,我们计算一种在线遍历规划方法,漫游车可以从任何起始状态(包括PSRs内部)开始遵循该方法,以最大化其生存概率。”
拉马尔及其同事概述的规划方法被称为恢复政策,因为它本质上是一种后备策略,允许漫游车最大限度地增加到达“安全”的机会(即阳光将到达的区域,为其电池充电)。在他们的论文中,研究人员表明,在这种情况下计算这种复苏政策可能具有挑战性,因为它需要几个近似值,如果非常不正确,可能会影响整体预测的可靠性。
“例如,时间是我们状态空间的连续维度,需要离散化,”拉马尔说。
“我们需要确保这种近似/离散化不会危险地扭曲对故障概率的预测。在月球南极,太阳光照是高度动态的;附近的山脉和环形山可能会在地表投下巨大的阴影。如果与(近似)政策假设相比,漫游者稍微落后于计划,它可能会错过关键的太阳能充电期。如果比政策设想的提前一点,也是如此。”
由于这些时间近似值极大地影响了太阳能漫游车回收政策的可靠性,拉马尔和他的同事们保持了高度保守。这最终将失败的风险降至最低,同时增加了该策略在现实任务中保持安全的可能性。
“我们认为这种方法在许多方面都是有用的,”拉马尔说。“首先,它代表着向远程自主移动规划算法迈出了一步,该算法主动考虑(或‘推理’太阳能漫游车的风险。此外,我们的技术可以成为人类操作员在月球南极制定新的月球车任务的有用工具(它可以用于着陆点选择、全球遍历规划和风险预测等),甚至可以通过地面回路操作支持正在进行的任务。”
在未来,这个研究小组引入的回收政策可以应用于月球上的真实世界探索任务,以降低在阴影区域丢失太阳能漫游车的风险。由于最近的研究是与美国宇航局的JPL合作进行的,这种方法很快就可以在各种现实的月球场景中进行测试。
“到目前为止,我们使用Cabeus环形山的轨道数据测试了我们的方法,但我们希望使用美国宇航局定制的太阳照明地图,并将我们的技术应用于月球南极的许多其他区域,这些区域有一天将被机器人或载人任务访问,如Shackleton,Faustini,Nobile,Haworth和Shoemaker环形山,”Lamarre补充道。“此外,我们目前正在研究新一代风险预测远程导航算法,用于利用太阳能漫游车探索月球南极。” |
|

 窥视卡
窥视卡 雷达卡
雷达卡 发表于 2023-8-28 16:37:31
发表于 2023-8-28 16:37:31
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 显身卡
显身卡