|
|
 发表于 2023-12-6 16:38:10
|
发表于 2023-12-6 16:38:10
|
查看: 80 |
回复: 0

冷冻机器人闯入欧罗巴海洋寻找生命迹象的概念图。鸣谢:美国国家航空航天局/JPL加州理工学院
()据美国国家航空航天局科学编辑团队:“跟着水走”一直是天体生物学界在宇宙中寻找外星生命的口头禅。正如我们所知,水是所有地球生命的基本组成部分,正如各种太空任务所发现的那样,水在整个太阳系,也许是整个宇宙中都很丰富。火星上古老的侵蚀特征显示了潮湿历史的明确证据,正在进行的毅力漫游者的探索旨在揭示火星是否曾经拥有微生物种群的线索。然而,我们能从化石记录中学到的就只有这么多了。为了真正了解可能的外星生命的本质,我们必须直接调查其源头——液态水。
输入“海洋世界”在过去的20年里,科学家们发现了大量的冰卫星围绕着我们太阳系的外围大行星运行。这些卫星中的许多显示了在其冰壳下隐藏着全球海洋的有力证据。事实上,这些卫星上的液态水可能比地球上所有海洋的总和还要多,有些甚至可能具备孕育生命的合适条件。特别是两个卫星,由于它们适合生命生存的条件和相对容易的调查,吸引了天体生物学家的想象力:木星的卫星,欧罗巴和土星的卫星,恩克拉多斯。这两项研究都有力地证明了一千米厚的水冰壳下存在着全球性的地下海洋——但是我们如何获取这些液态水呢?
在过去的几十年里,人们研究了各种海洋通道的概念,从穿过裂缝下降的机器人到各种类型的钻机。一个已经成为主要候选的概念是冷冻机器人。低温机器人是一个独立的圆柱形探测器,利用热量融化其下方的冰。融化的水在探头后面重新冻结之前先在探头周围流动。热冰钻探如此简单有效,已经成为研究陆地冰川和冰盖的常用工具。但是,我们如何将这项技术转化为一个可以穿透更冷、更厚、更不确定的行星冰壳的系统?
在过去的几年里,这一困境一直是研究人员的核心关注点,他们中的许多人都得到了美国国家航空航天局的木卫二科学探索地下访问机制(SESAME)和海洋世界生命探测技术概念(COLDTech)计划的支持。2023年2月,美国国家航空航天局的行星探索科学技术办公室(PESTO)在加州理工学院召开了一次研讨会,聚集了来自全国不同领域和机构的近40名顶级研究人员,讨论这项技术的成熟进展,并评估仍然存在的挑战。最近的研究在完善我们对冰壳环境的理解、细化任务架构以及使关键子系统和技术成熟方面取得了重大进展。特别是,研讨会的与会者确定了四个关键的子系统,推动了发展飞行准备架构的路线图:电源,热,移动和通信子系统。
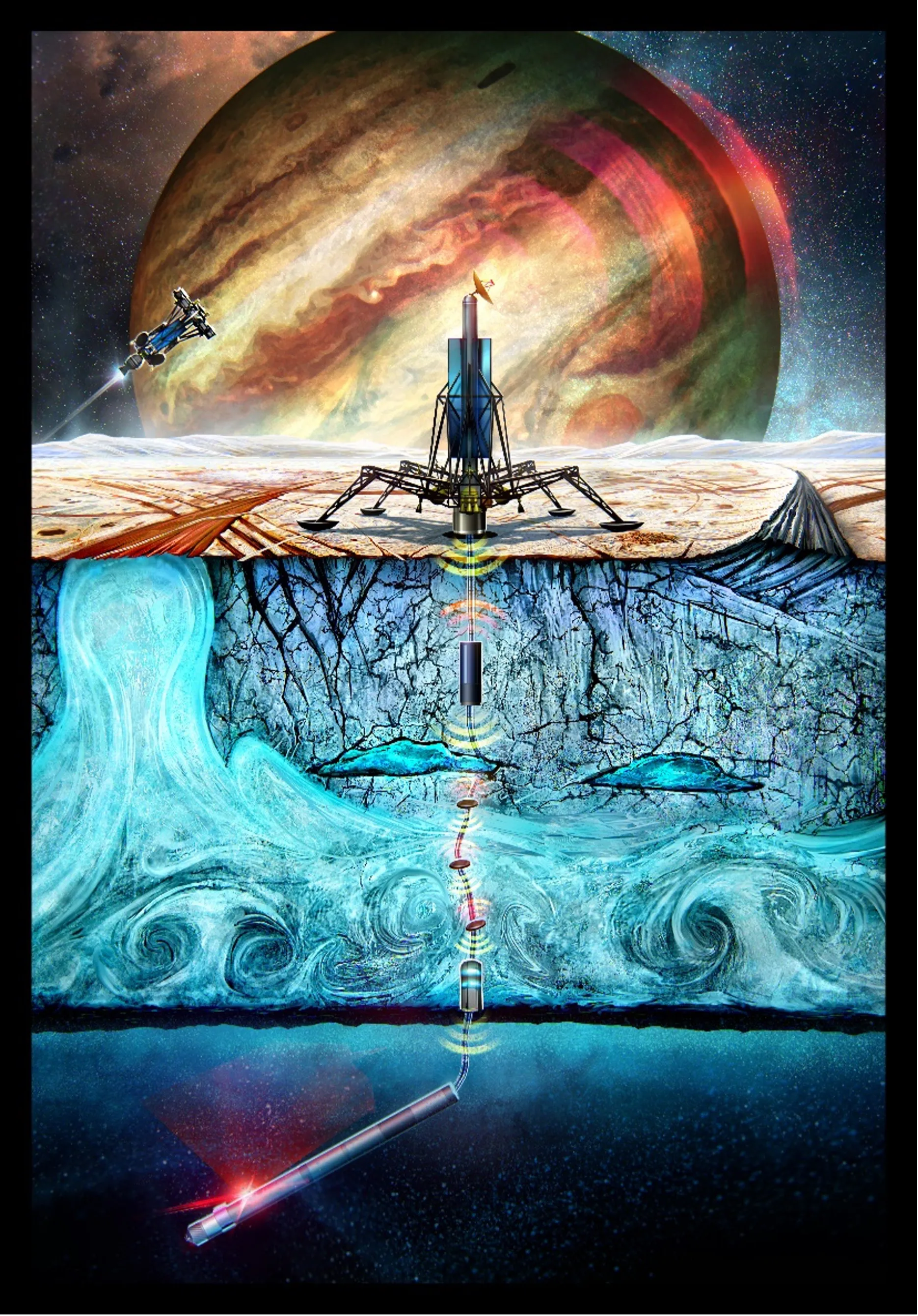
图2冷冻机器人任务剖面的概念图。一个着陆器部署了一个核动力探测器,它融化冰壳进入下面的海洋。在探测器下降过程中,在探测器后面部署了系绳和无线收发器,以便进行通信。鸣谢:美国国家航空航天局/JPL加州理工学院
首先,低温机器人的心脏是一个核能系统,它产生融化数公里厚的冰所需的持续热量。已经确定了各种适合低温机器人系统的核动力系统,包括为许多深空任务提供动力的熟悉的放射性同位素动力系统(RPS),以及可能在未来几年开发的裂变反应堆。驱动动力系统设计的两个关键限制是:(1)足够的总功率和密度以促进有效熔化(约10 kW),以及(2)在结构船内的集成以保护动力系统免受深海高压的影响。这些挑战都是可以解决的,并且有一些历史先例:美国国家航空航天局的卡西尼任务有一个14千瓦的热动力系统,几个放射性同位素热电发电机(RTG)在1960年代和1970年代被部署到海底,作为导航信标的电源,其工作压力与欧洲海洋相当。然而,低温机器人的动力系统将需要在整个任务概念的成熟过程中与能源部的一致努力和密切合作。
第二,需要热管理系统来管理由机载核动力系统产生的热量,维持安全的内部温度,并将热量分配到环境中以实现高效的性能。该系统需要两个独立的泵送流体回路:一个通过嵌入皮肤中的通道循环内部工作流体,另一个通过周围环境循环融化的冰水。其中一些技术已经在缩小和全尺寸下进行了演示,但还需要更多的工作来验证在外太阳系预期的冰条件范围内的性能。
此外,木卫二和土卫二的冰壳将包含尘埃和盐等杂质,当这些杂质足够集中时,可能需要辅助系统才能穿透。“水喷射”和机械切割的结合已经被证明可以有效地清除从探针下面的细小颗粒到固体盐块的碎片。一些杂质,如较大的岩石、空隙或水体,可能仍然无法穿透,这需要cryobot整合一个向下看的地图传感器和转向机制——这两者都已经在陆地原型中得到演示,尽管尚未成为一个集成系统。高度优先的未来工作包括对结冰环境进行更严格的概率定义,以量化潜在移动危险的可能性,以及在类似飞行的cryobot系统上对危险缓解系统进行综合演示。Europa Clipper还将提供关键观测数据,以限制低温机器人危害的普遍性和特征。
最后,cryobot任务需要通过冰壳建立强大而冗余的通信链路,以使着陆器能够将数据中继到轨道中继设备或直接传输到地球。光缆是与陆地融化探针和深海航行器通信的行业标准,但需要仔细验证才能通过活跃的冰壳部署。冰在这些外壳中的移动可能会使电缆断裂。约翰·霍普金斯应用物理实验室的凯特·克拉夫特博士领导的一个小组一直在研究嵌入冰中的绳索在冰剪切事件中断裂的倾向,以及减轻这种断裂的方法。虽然这项研究的初步结果非常令人鼓舞,但其他团队正在探索通过冰进行通信的无线技术,包括射频、声学和磁性收发器。这些通信系统必须集成到探测器的后端,并在下降过程中使用。目前由美国国家航空航天局酷迪科技项目资助的项目正朝着解决通信系统的关键风险迈出第一步。未来的工作必须在更广泛的条件下验证性能,并在低温机器人上展示集成。
虽然电力、热、移动和通信子系统占据了中心位置,但研讨会参与者还讨论了其他关键系统和技术,这些系统和技术需要成熟才能实现cryobot任务。这些主题包括集成仪器套件,具有液体取样和面向外的孔,行星保护和消毒策略,减轻腐蚀的材料选择,冰锚定机制和自主性。然而,这些技术都没有被确定为cryobot任务概念路线图中的主要风险或挑战。
总的来说,讲习班参加者的一致结论是,这一任务概念仍然是可行的,在科学上是令人信服的,并且是在海洋世界现场直接寻找生命的最合理的近期方式。持续的支持将使科学家和工程师在为未来的任务机会准备低温机器人方面取得更大的进展。直接探测另一个世界的生命的可能性似乎比以往任何时候都大。
这项研究是在美国国家航空航天局(80NM0018D0004)的合同下,在加州理工学院喷气推进实验室进行的。
项目负责人
Benjamin Hockman博士,加州理工学院喷气推进实验室
赞助组织
美国国家航空航天局行星探索科学技术办公室 |
|


 窥视卡
窥视卡 雷达卡
雷达卡 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 显身卡
显身卡